I have a wide range of skills, which can be broadly classified under Computer Science (computer vision, graphics, machine learning), Electrical Engineering (microprocessors, embedded systems, digital signal processing) and Mechanical Engineering (mathematical modelling, simulation).
While this page lists some of the large projects I have been involved with, I have also worked on a number of smaller projects which can be viewed here.
"The Good, the Bad and the Ugly" is a dataset created by NIST as part of its face and occular challenge series. The dataset comprises full-frontal face images of multiple subjects, with the aim of classifying a given pair of images as being of the same subject, or of different subjects.
We train a classifier with features derived from a large-scale search in parameter space of a biologically-inspired multi-layer convolutional network to achieve state-of-the-art results on this dataset.

Most existing HT implementations are serial in nature, thereby limiting their usability in applications that demand real-time capability.
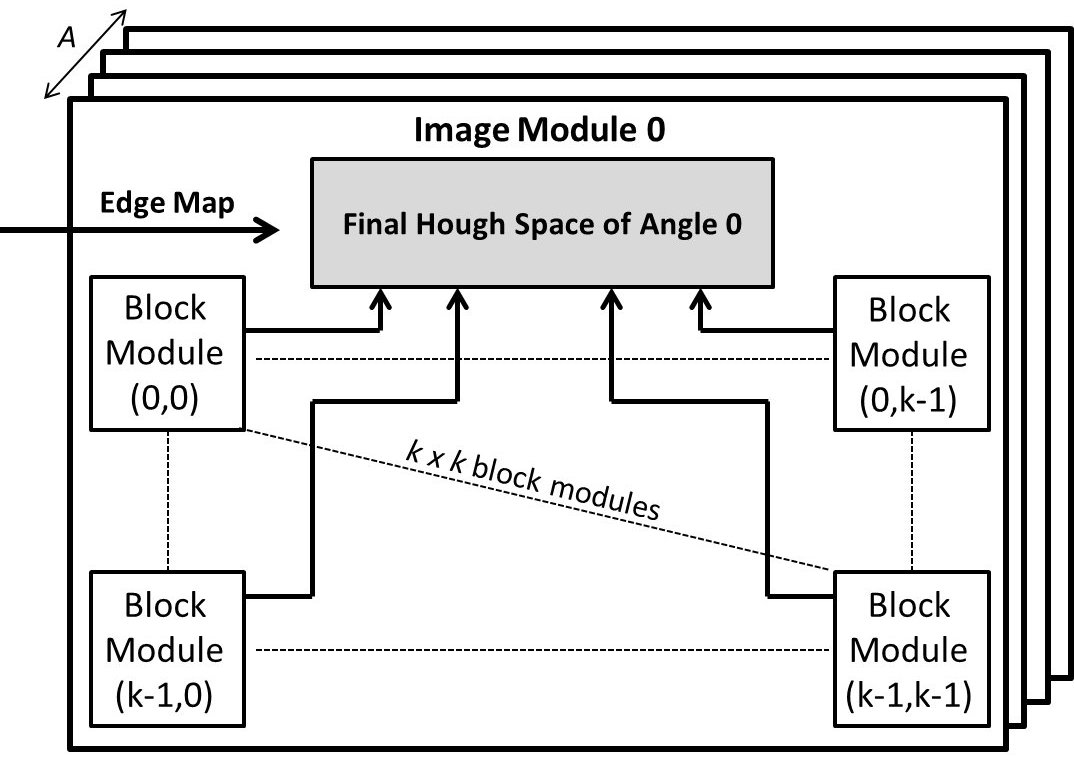
We implemented a novel block-based version of the Hough Transform called the Additive Hough Transform on a variety of architecture and demonstrated its effectiveness in both serial and parallel environments over the conventional Hough Transform.
Shantanu S. Sinha, R.K. Satzoda, S. Suchitra, T. Srikanthan, "Additive Hough Transform on Embedded Computing Platforms", at the 56th IEEE International Midwest Symposium on Circuits and Systems (MWSCAS). Columbus, Ohio, USA. 2013. (pdf)
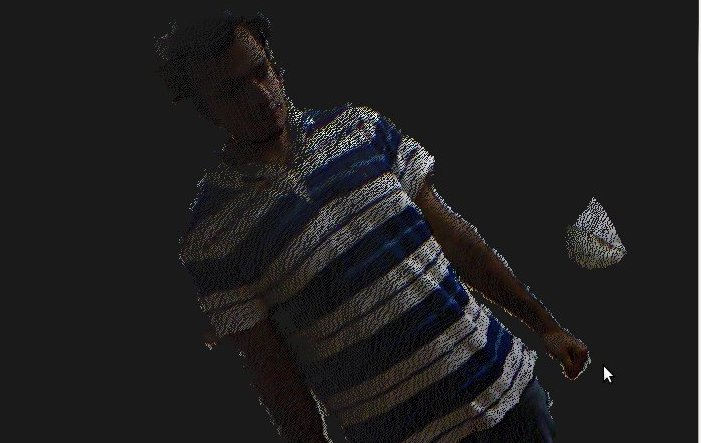
Animatable models of humans find application in many virtual reality applications like video games, movies, training exercises etc., but generation of these 3D models is usually a time-intensive process and requires high-end hardware generally unavailable to the end user.
We aim to tackle this problem by developing a system that supports real-time data capture from a hand-held depth camera (such as the Kinect), simultaneously providing rough feedback to the user. Fine adjustment of this rough fit can then take place asynchronously in parallel.
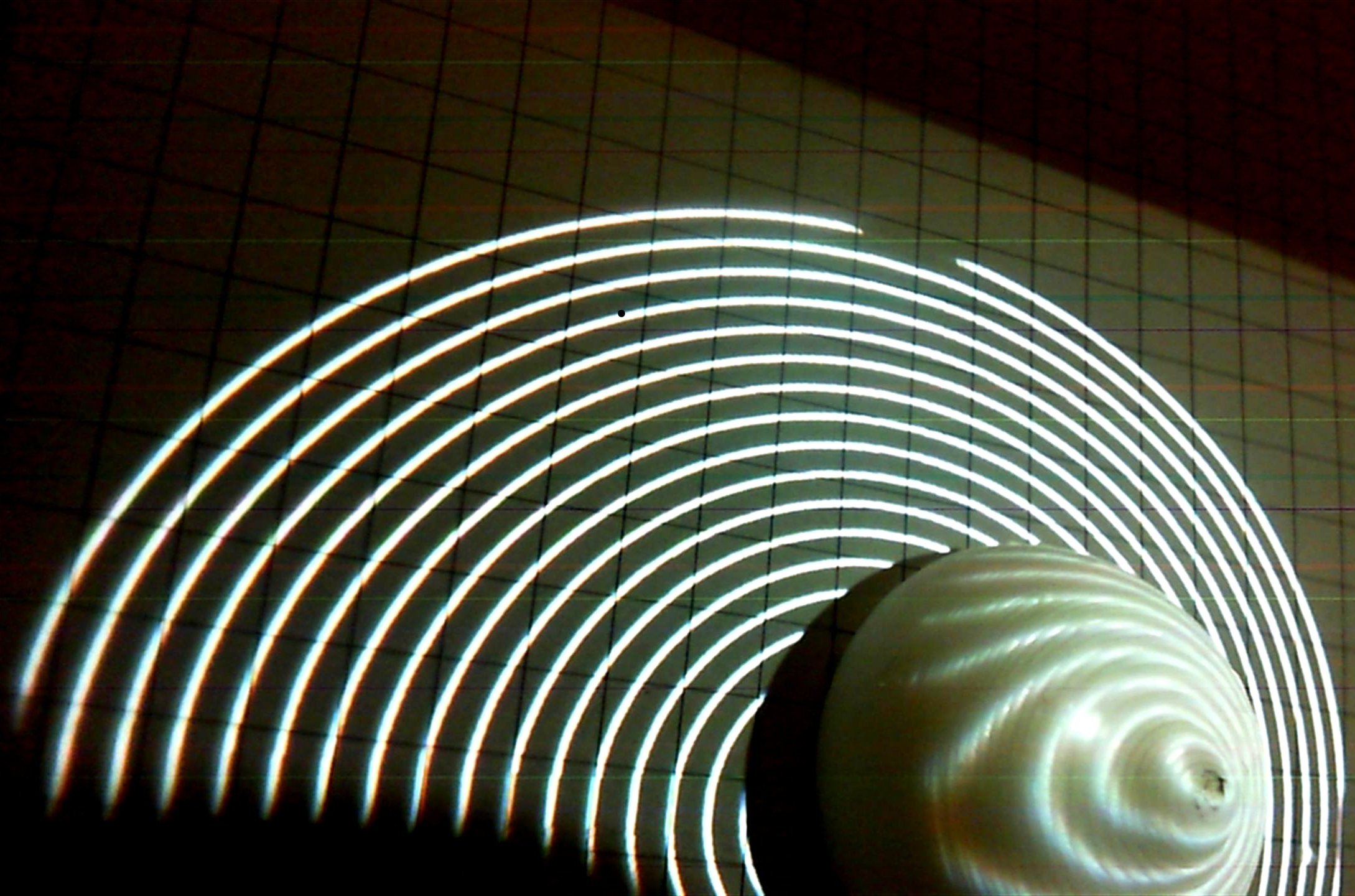
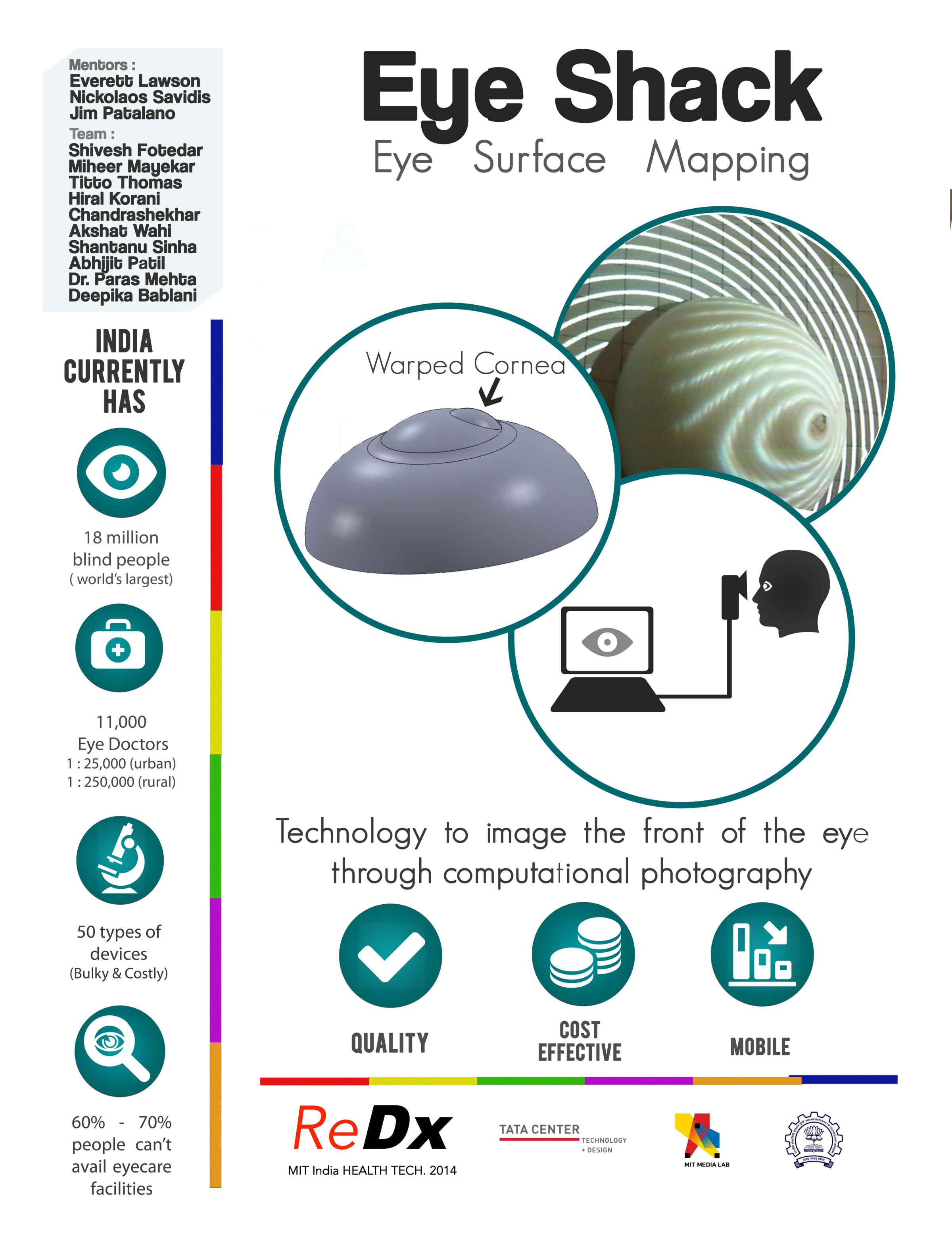
The challenge in imaging the eye, today, is not the availability of technology, but access to this technology. Ocular imaging is a specialized procedure involving million-dollar instruments and highly-trained ophthalmologists, possible only in major hospitals in big cities.
We plan to change this by employing advanced computer vision techniques, clever illumination and simplified optics to build an affordable, portable, user-friendly device that can easily be carried to patients in rural areas and operated by lesser-trained nurses for preventive diagnosis of many major illnesses.
MIT-India Health Tech. Workshop Poster
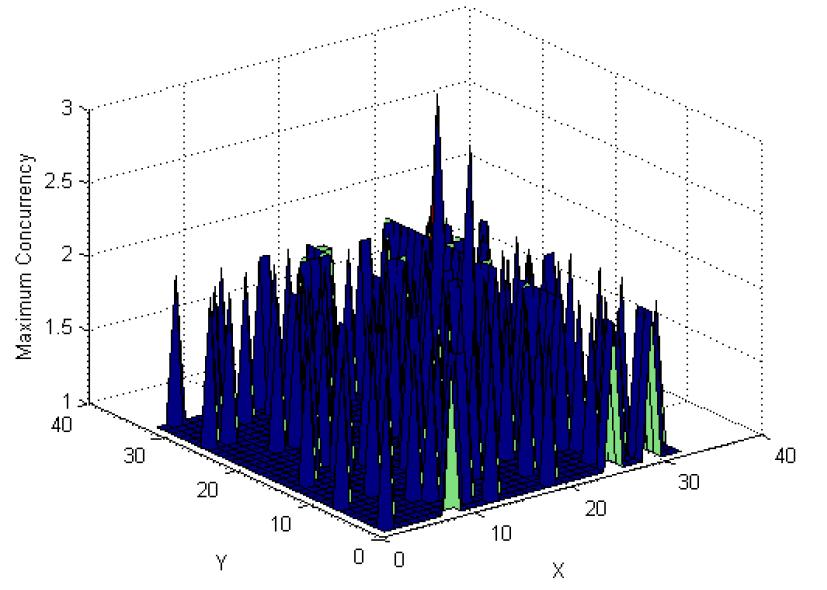
One of the primary drawbacks of the Additive Hough Transform (discussed above) is the compulsory atomic access to the final Hough Space. Thus, even if the Hough Transform within the blocks are computed in parallel, these individual Hough Spaces must then be summed in serial, requiring a number of excess cycles.
On observation it can be seen that it is necessary to compute the Hough Transform of a pixel only at the gradient angle at that pixel in the edge map (the O'Gorman Hough Transform). We exploit this property to parallelize summation of the local Hough Spaces of each block.
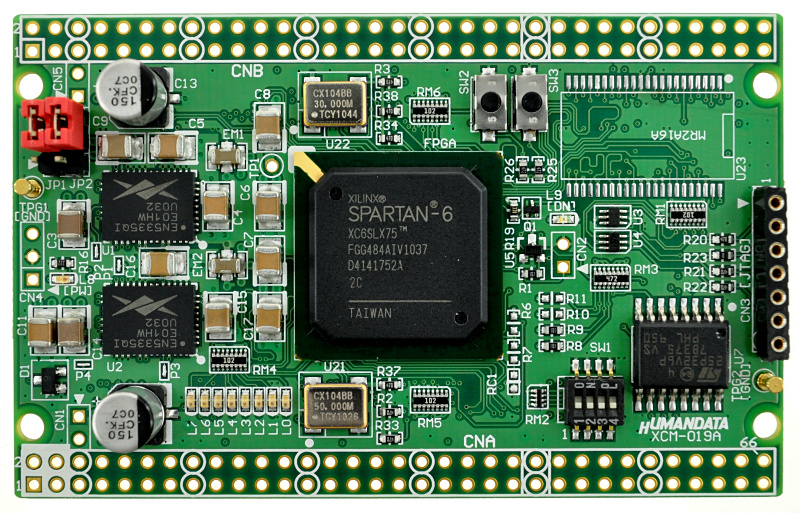
DSP boards like the Infineon TriCore find a wide range of applications in the automotive industry, such as in active suspension systems and electric power steering. Many routines used to achieve these tasks are inherently parallel, but these parallelisms cannot by exploited on a single CPU thread.
We first optimized various standard image and signal processing routines for the Infineon TriCore at the assembly level and then coupled the TriCore with a hardware accelerator (Xilinx Spartan 6 FPGA) to speed up inherently parallel time-intensive computations.
Manual book retrieval in large library systems, like that of IIT Bombay, is an incredibly cumbersome process for both library members and staff. We formed a team and decided to work on a robot that could accomplish book retrieval tasks autonomously.
This project involved a large number of independent components, each handled by a different team member. I, specifically, worked on the sensors and navigation modules for the robot. We used ultrasonic sensors for rough positioning, further refined using TSOP1738 infrared receivers. For route planning, we developed a modified version of the A* heuristic search to suit our purpose.
Unfortunately, this project could not come to completion as some of the team members graduated. The navigation and sensors modules were, however, ready for use.
This work formed the research component of a course on Manufacturing Processes
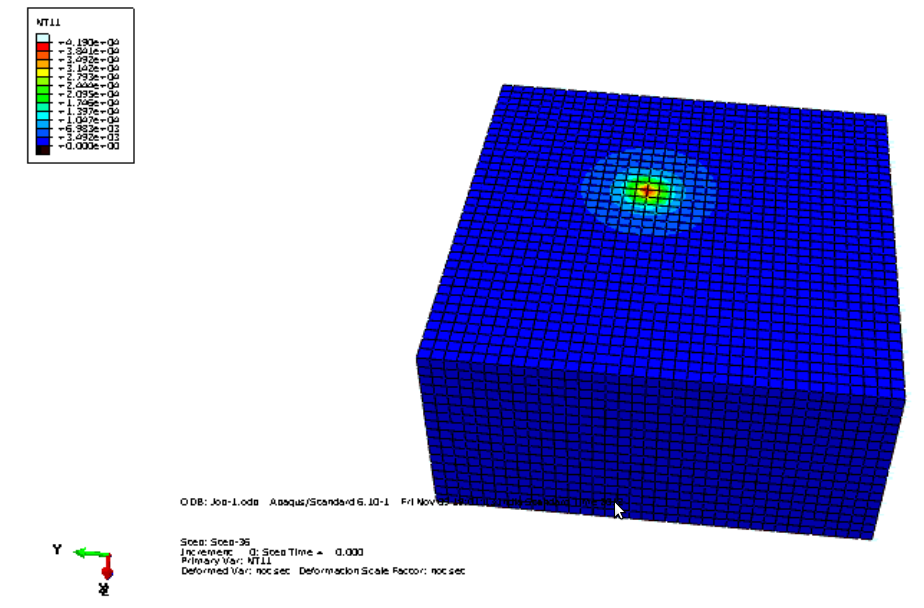
Hydroxyapatite (HA) is a core component of human bones, accounting for up to 50% of the total bone mass. Modern prosthetic implants are frequently coated with HA through laser cladding, as it helps with osseointegration (the formation of a direct interface between the implant and the bone, without any intervening tissue).
We accurately modelled the temperature distributions during the entire cladding process and determined the optimal coating thickness that would confine temperatures to a favourable range, while still achieving the desired interfacial bond strength. The model was generated using finite element methods in Abaqus.
This work formed the research component of a course on Machine Design
To cope with the higher peak cylinder pressure requirement of diesel engines, engine parts must be manufactured from stronger, heavier components. The secondary inertia forces due to the rotation of these heavy components cause secondary vibrations, which are the main sources of NVH (Noise, Vibration and Harshness) in automobiles.
To counter this, car manufacturers employ balancer shafts that rotate at twice the engine speed. While a single balancer shaft does succeed in neutralizing secondary vibrations from the engine, a moment is created between the balancer and crank shafts due to which NVH is not completely neutralized.
We attempt to completely nullify engine vibrations by employing a dual balancer shaft system, comprising a balancer shaft and an idler shaft rotating in opposite directions.
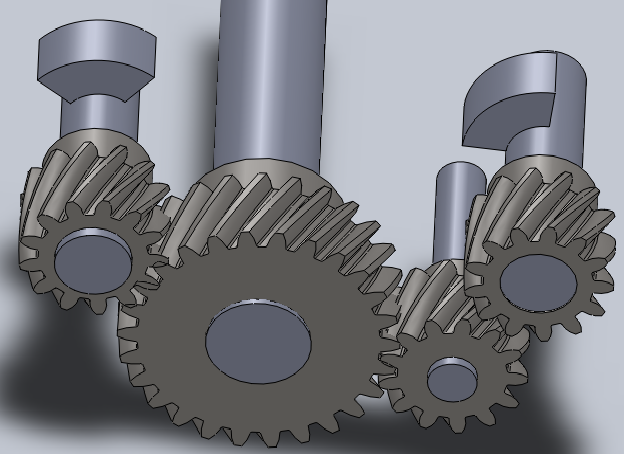
This work formed the research component of a course on Kinematics and Dynamics of Machines
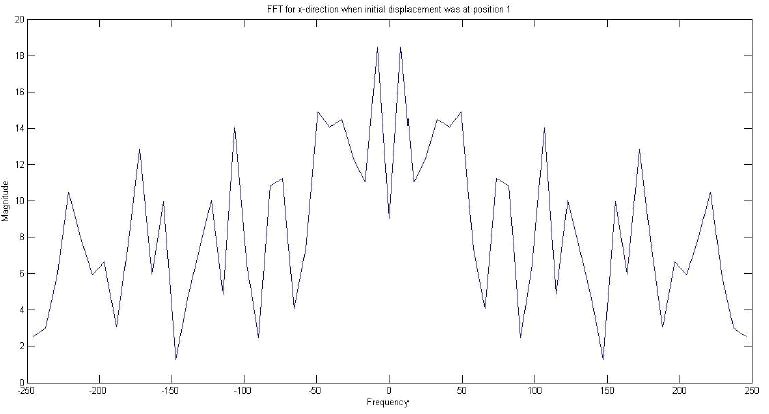
The MacPherson strut is one of the most common front suspension systems in vehicles. It consists of a single spring and shock absorber per wheel. Despite its popularity, the MacPherson strut is known to let noise and vibrations through form the road to the chassis, resulting in poor ride quality.
To analyze this behaviour, we theoretically determined the impulse absorbed by each shock absorber as a function of point of impact and then developed a simplistic model using accelerometers of the entire system for experimental validation. Finally, we performed Fourier analysis to determine the natural frequencies of vibration of the system.
{kind=link}