Trisk: A Conversational Robot
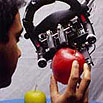
Trisk is a humanoid robot that integrates speech input, visual perception, and active touch in order to interact with humans and its environment. It can understand and obey natural language commands, and will soon be able to answer questions. The robot is a platform for designing new algorithms and multimodal knowledge representations for sensory-motor grounded language use.