

An Upper Torso Humanoid Robot
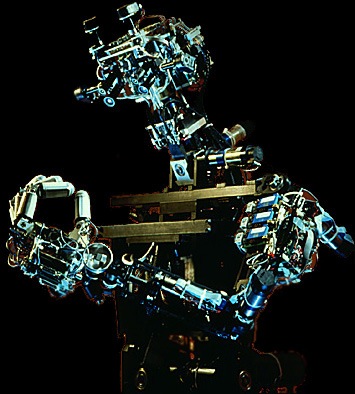
Avoiding flighty anthropomorphism, you can consider Cog to be a set of sensors and actuators which tries to approximate the sensory and motor dynamics of a human body. Except for legs and a flexible spine, the major degrees of motor freedom in the trunk, head, and arms are all there.
Cog is a single hardware platform which seeks to bring together each of the many subfields of Artificial Intelligence into one unified, coherent, functional whole. It is the "mind child" of Prof. Rodney Brooks and was developed at the MIT AI Lab starting in the mid-1990s. Cynthia was the lead graduate student on the Cog project for several years before switching her research focus to develop Kismet.
Cog's official website.
Avoiding flighty anthropomorphism, you can consider Cog to be a set of sensors and actuators which tries to approximate the sensory and motor dynamics of a human body. Except for legs and a flexible spine, the major degrees of motor freedom in the trunk, head, and arms are all there.
Cog is a single hardware platform which seeks to bring together each of the many subfields of Artificial Intelligence into one unified, coherent, functional whole. It is the "mind child" of Prof. Rodney Brooks and was developed at the MIT AI Lab starting in the mid-1990s. Cynthia was the lead graduate student on the Cog project for several years before switching her research focus to develop Kismet.
Cog's official website.
Papers
Brooks, R., Breazeal, C., Marjanovic, M., Scassellati, B., and Williamson, M. (1999), "The Cog Project: Building a Humanoid Robot", in C. Nehaniv (ed.), in Computation for Metaphors, Analogy, and Agents, Lecture Notes in Artificial Intelligence 1562, New York, Springer-Verlag, 52--87. (PDF file)
Brooks, R., Breazeal(Ferrell), C., Irie, R., Kemp, C., Marjanovic, M., Scassellati, B., and Williamson, M. (1998), "Alternative Essences of Intelligence", in Proceedings of the Fifteenth National Conference on Artificia Intelligence (AAAI 98), Madison, WI. 961--967. (PDF file)
Ferrell, C. (1996), "Orientation Behavior Using Registered Topographic Maps'', in Proceedings From the 4th International Conference on Simulation of Adaptive Behavior Conference, Cape Cod, MA, 94--103. (PDF file)
Brooks, R., Breazeal, C., Marjanovic, M., Scassellati, B., and Williamson, M. (1999), "The Cog Project: Building a Humanoid Robot", in C. Nehaniv (ed.), in Computation for Metaphors, Analogy, and Agents, Lecture Notes in Artificial Intelligence 1562, New York, Springer-Verlag, 52--87. (PDF file)
Brooks, R., Breazeal(Ferrell), C., Irie, R., Kemp, C., Marjanovic, M., Scassellati, B., and Williamson, M. (1998), "Alternative Essences of Intelligence", in Proceedings of the Fifteenth National Conference on Artificia Intelligence (AAAI 98), Madison, WI. 961--967. (PDF file)
Ferrell, C. (1996), "Orientation Behavior Using Registered Topographic Maps'', in Proceedings From the 4th International Conference on Simulation of Adaptive Behavior Conference, Cape Cod, MA, 94--103. (PDF file)
© Sam Ogden