Technical specifications
- Propulsion: 3 or 4 micro electric ducted fans (impellers)
- Power: Wires, solid-state lithium ion batteries. Later: thin film lithium
batteries, or Wireless Power Transmission (WPT)
- Auto stabilizing, precision guidance: A helicopter, real or model, is very
unstable due to its construction principles. To fly it means first to compensate all
the internal and external forces which try to get it out of balance. To automize this
process, a lot of sensors are necessary.
There are two possibilities: relative position measurement (e.g., inertial navigation),
and absolute position measurement (e.g., GPS, or active beacons on laser, ultrasonic,
or radio-frequency basis)).
- Relative position measurement: Inertial sensors give acceleration information for
angular motions (vertical,
longitudinal, lateral) ((Translational-motion or rotational-motion inertial sensors,
means accelerometers or gyroscopes? Piezoelectric vs. piezoresistive vs. capacitive?))
- Absolute position measurement by LPS (Local Area Positioning
system, similar to GPS): 3-4 wireless mini transmitters, stuck somewhere on the walls
of the room (1 for security). Possible realization: trilateration with active ultrasonic
beacons. Depending on how many points of the FFMP are computed for their absolute
position, heading sensors like compass and inclinometers might be necessary too.
Ultrasonic measurement
seems to be the only real option, because beacons on laser basis require direct visual
contact, and RF (radio-frequency) does not seem to work reliably indoors (Borenstein,
Everett, and Feng, 1996, p. 65).
Accuracy requirement: 1 - 5 mm.
If the FFMP "floats" away due to internal instability or external
influences (airflow), it tries to return to its initial absolute position.
- Hybrid sensing: combination of both! Outlook: hybrid sensor 3 axis acceleration with
GPS: today 8 in.ģ and 3 W power consumption; in 2005: 2 in.ģ and 0.5 W.
- Security:
- soft edges
- airbag, in case of failure of engines
- large button to shut off all engines (automatically switching off all engines
in case of collision?)
- Ground station: should get obsolete later, all functions should be on board!
- receiving AV stream
- translating indirect voice commands
- logging all activities and behavior
- making connection to Web
- making connection between different FFMP
|
What's the current state of autonomous helicopters? Interesting links:
- Smallest helicopter with 4 rotors:
Gyrosaucer II E-570 by KEYENCE.



It is the smallest commercially available 4-rotor electro helicopter, as far as I know.
Unfortunately, it is not available in the States.
The only place outside Japan where you can get one is
Intertronics
in Germany. Or by mailorder from an R/C model shop in Tokyo called TENSHODO (which turned
out to be the cheaper way). It is NOT an autonomous heli, but I guess it would be easy
to start with this machine and to modify it!
- Hovering automatically with 4 rotors: I know only of two projects which deal with
that:
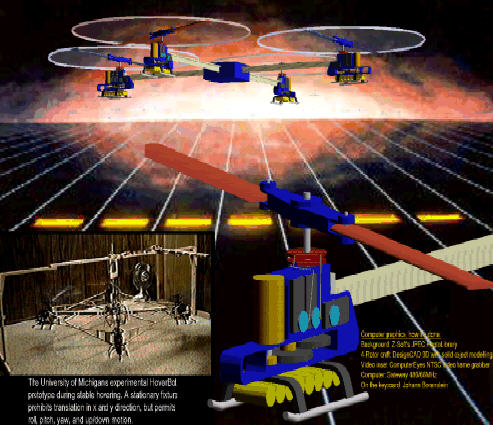
 Hoverbot (here's
another page) by
Johann Borenstein
at University of Michigan.
The HoverBot paper
(unpublished draft, PDF format) is a very comprehensible and concise introduction
to the problems of 4-rotor design helis. There is also a
slideshow,
as well as a short
movie
about the HoverBot. Although yaw, pitch, roll, and elevation (motion in the
z-direction) were controlled and stabilized by the computer, HoverBot was confined in
x and y direction by a support fixture. The control system is quite complex, because not
only thrust of the electro motors is controlled, but also rotor pitch. Unfortunately,
this very interesting project was discontinued 1992 after only 3 months (funding reasons).
Main difference to what I plan to do is size and complexity: HoverBot is much bigger than
what I have in mind; I do not plan to use rotor pitch (mechanically complex); Hoverbot
has a set of different sensors like accelerometers, gyroscopes, compass, and range
detector: I will probably go with only high precision absolute position measurement.
Hoverbot (here's
another page) by
Johann Borenstein
at University of Michigan.
The HoverBot paper
(unpublished draft, PDF format) is a very comprehensible and concise introduction
to the problems of 4-rotor design helis. There is also a
slideshow,
as well as a short
movie
about the HoverBot. Although yaw, pitch, roll, and elevation (motion in the
z-direction) were controlled and stabilized by the computer, HoverBot was confined in
x and y direction by a support fixture. The control system is quite complex, because not
only thrust of the electro motors is controlled, but also rotor pitch. Unfortunately,
this very interesting project was discontinued 1992 after only 3 months (funding reasons).
Main difference to what I plan to do is size and complexity: HoverBot is much bigger than
what I have in mind; I do not plan to use rotor pitch (mechanically complex); Hoverbot
has a set of different sensors like accelerometers, gyroscopes, compass, and range
detector: I will probably go with only high precision absolute position measurement.
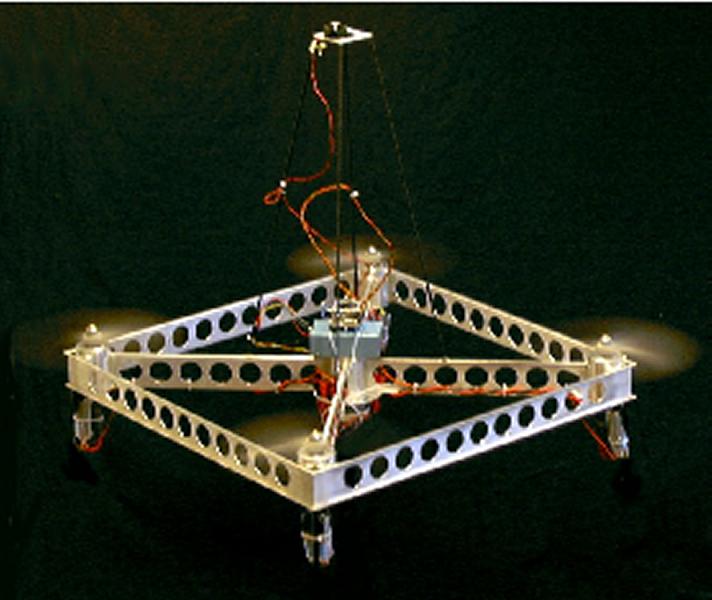
 Hovering Platform ("Schwebende Plattform"), a 1998 summer term
project at the Automatic Control
Laboratory (IfA, Institut für Automation) of the Swiss ETH in Zürich.
In a
previous thesis work, a hovering platform with four electro motors was constructed.
An onboard compass module and two inclinometers measured the heading of the
platform, and the speed of the motors was controlled to stabilize the heading of the
platform. In the new project, the position has to be controlled too.
So the project will be about evaluating appropriate sensors like DGPS
(differential GPS) or ultrasonic transducers, as well as designing controlling
concepts and testing the prototype in free flight. Urs Baumann did this very interesting
project, and he calls it
Flying Platform ("Fliegende Plattform").
It is mainly about the modeling of the systems dynamics and the design of the controls for
stabilizing the platform. He uses three sensors: ultrasonic absolut position sensing
(VS-100 by Litec, Inc.); a hybrid sensor which measures roll and pitch acceleration and
inclination and yaw angle with a geomagnetic sensor (
TCM2 by Precision Navigation); additional
roll and pitch gyro (Gyrostar ENC-05 by Murata).
Free flights of a few seconds duration were conducted.
Hovering Platform ("Schwebende Plattform"), a 1998 summer term
project at the Automatic Control
Laboratory (IfA, Institut für Automation) of the Swiss ETH in Zürich.
In a
previous thesis work, a hovering platform with four electro motors was constructed.
An onboard compass module and two inclinometers measured the heading of the
platform, and the speed of the motors was controlled to stabilize the heading of the
platform. In the new project, the position has to be controlled too.
So the project will be about evaluating appropriate sensors like DGPS
(differential GPS) or ultrasonic transducers, as well as designing controlling
concepts and testing the prototype in free flight. Urs Baumann did this very interesting
project, and he calls it
Flying Platform ("Fliegende Plattform").
It is mainly about the modeling of the systems dynamics and the design of the controls for
stabilizing the platform. He uses three sensors: ultrasonic absolut position sensing
(VS-100 by Litec, Inc.); a hybrid sensor which measures roll and pitch acceleration and
inclination and yaw angle with a geomagnetic sensor (
TCM2 by Precision Navigation); additional
roll and pitch gyro (Gyrostar ENC-05 by Murata).
Free flights of a few seconds duration were conducted.
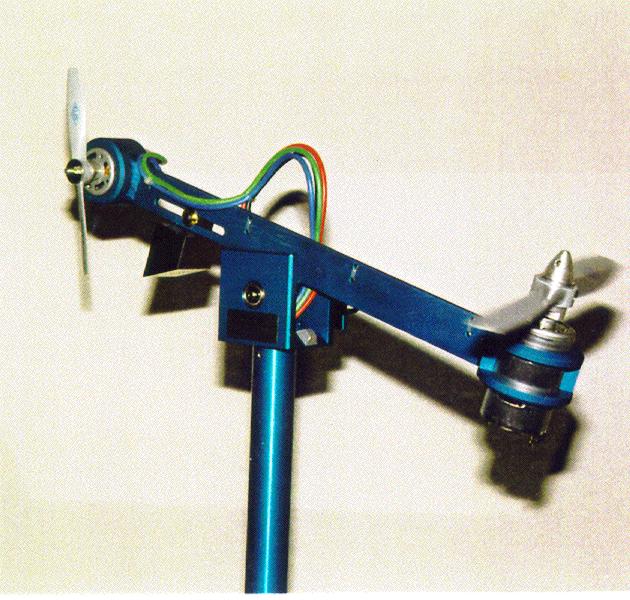
Another related
project (IfA03)
uses a simple bar with two motors and 2 DOF to study the MIMO system of a possible autonomous
electric helicopter. Here are the
manuals
for the system as well as for the helicopter modell (partly .PDF, partly .PS format).
- Aerial Robotics competitions: Here the most successful autonomously flying robots meet:
- Conferences: First International Conference on Emerging Technologies for Micro Air Vehicles
- Robot Blimps: Because they are mechanically much simpler than planes or helicopters, they would be much easier to make "stand still in the air." This would be a really elegant solution! Unfortunately, due to their underlying construction principle, they can not be small.
- Honey is called a
flying autonomous robot. Actually, it is an indoor blimp controlled by an off-board PC.
It has various sensors including a camera and four propellers for motion control. It was mainly
developed by
Hiroshi Kobayashi with some assistance from
René Schaad. Honey was built for use in navigation experiments and for experiments
involving human-robot interaction.
-
The interactive balloon: Sensing, actuation, and behavior in a common
object, by J. A. Paradiso
- AV Pointer Micro Blimp is from a NASA database
- ORCA MicroAirships
- Mark I and Mark II by the Robot Group, Austin, Texas
- PRoP: Personal Roving Presence: "simple, inexpensive, internet-controlled, untethered tele-robots." Pretty weird...
- "Floaters": UAV (Unoccupied Air Vehicle) testbed: it provides a simple platform which requires real-time control and monitoring. It's about a concepts for agent systems experimentation. Here's the slideshow.
- Unmanned Airship Links: a list of sites that contain information about RC airships, airship robots, drones, remotely piloted vehicles (RPV) and other lighter-than-air craft that are designed to operate without carrying human pilots
- Blimps, LTA's, Balloons: another huge list of links.
- Position measurement, relative and absolute: The paper/book/CD-ROM
Where am I? -- Systems
and Methods for Mobile Robot Positioning, edited and comiled by Borenstein et al.,
is a very intersting source for all sorts of sensors and techniques for robots.
- The
Autonomously Flying Helicopter of the
Measurement and Control Laboratory (IMRT) at the
Swiss Federal Institute of
Technology (ETH) in Zürich, Switzerland.
- The DV8
of the University of California, Berkeley.
John Koo seems to be
interesting.
-
Inertial proprioceptive devices: Self-motion-sensing toys and tools:
Chris Verplaetse's paper is about proprioceptive devices which have a sense of their own motion and position. He differentiates absolute position from inertial sensing, and explains the advantages and disadvantages of each, e.g., inertial sensors do not need any external reference, but position errors accumulate. He describes a general system with inertial sensors, where the MIMO unity is not necesseraly pre-programmed, but uses Kalman filter and pattern recognition in a system with neural networks or Hidden Markov models. Finally, he describes a few commercially available inertial sensors (accelerometers and gyroscopes).
|
Approach
Phase 1a: testing and evaluating Keyence's Gyrosaucer II E-570.
- Controlling concept: Elevation, roll, pitch, and yaw are controlled by adjusting the speed of the 4 motors/propellers (two rotating clockwise, two counterclockwise). Through this construction, Gyrosaucer has 4 degrees of freedom (DOF): up/down, sideways, forward/backward, and horizontal rotation (vertical axis). These are controlled manually through a 4CH remote control, with limited support from the built-in gyroscopes.
- Sensor concept: How is the efficiency of the free gyro and the rate gyro?
Phase 1b: building simple FFMP with exobrain and umbilical cord
The mechanically simplest construction, which enables automatic hovering. It consists of:
- 4 motors/propellers: ducted fans or impellers
- single sensor: absolute position sensing
- controller: processing outboard on a PC ("exobrain")
- no batteries: power for motors through wires ("umbilical cord")
Questions:
- Automatic stabilization: Is a absolute position sensor enough for stabilization, or are gyroscopes, inclinometers, and compass necessary as well?
- Which are the options for absolute position sensing in 3D space?
- Ultrasonic. On FFMP: ultrasonic microphone. Within action range (room): 3 ultrasonic loudspeakers (or rather: three clusters) which emit pulsed signals (different frequencies and sequences). The microphone receives these signal and sends them back to ground station (wire, analog signal), where the signal is parsed and time delays between original sequences and received signals are measured. With these three time delays, the absolute distances are computed. After initialization ("learning") the system is able to describe the absolute position of the FFMP in 3D space.
- RF based. On FFMP: 3 RF receivers (antennas), placed on the most extreme parts of the FFMP. Within action range (room): radio frequency emitter. The emitter sends a high-frequency signal. The signals of the 3 antennas are compared for their phase. From the phase difference, the absolute distance is computed, and from there the absolute position in 3D space. (Weather this is made on board or on ground station is not yet clear).
|
|



{kind=link}
{kind=link}
{kind=link}