This page lists some of the smaller projects, including self-motivated projects that I have worked on during my stay at IIT Bombay. To view a complete list of the larger, more research-oriented projects I been involved with, click here.
This work was performed as a semester-end project for a course on Computer Vision
Purely vision-based Simultaneous Localization and Mapping (SLAM) systems are becoming increasingly popular as the only hardware they require is a camera. I had made extensive use of Parallel Tracking and Mapping (PTAM) in my work with generation of 3D models of human subjects..
While working with PTAM I realized the enormous potential of a purely RGB-D based camera tracker that works as efficiently as PTAM and decided to start work on the same.
While tracking does function, camera movements must be smooth and slow as the system fails to perform at real-time. I plan to continue work on this project and further optimize the code for real-time performance.

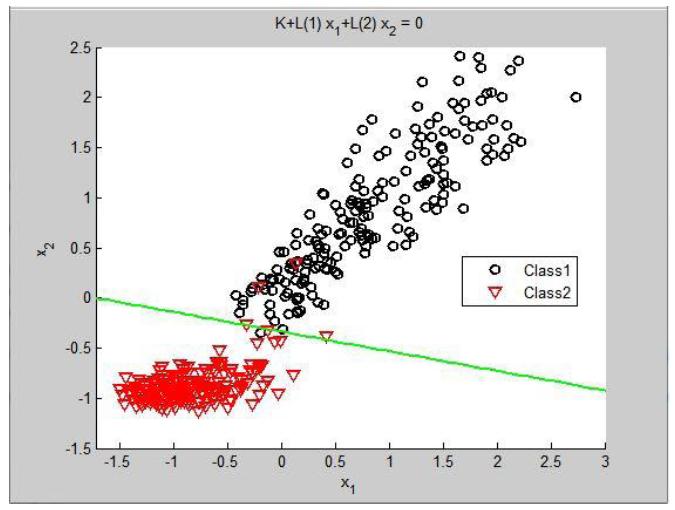
This work was performed as a semester-end project for a course on Pattern Recognition
Implemented various pattern classification algorithms like support vector machines, Ho-Kashyap linear classifier, Bayesian classifier as well as unsupervised learning techniques like k-means clustering to determine the best possible classifier for the given data.
Successfully classified training and test data with overall accuracy of 98.3% across 5620 instances using a modified Ho-Kashyap linear classifier for pairwise classification of digits.
This work was purely self-motivated, not being a part of any larger project.
I had developed a fascination for computer vision in my sophomore year and wanted to build something of practical use. I decided to build a system that autonomously identified objects of a particular colour and shape and tracked them over time.
Additionally, this system could convert the image coordinates to a 3D world coordinate system (depth being assumed to be a fixed value) using a perspective projection model. Finally, the laptop-camera system was interfaced with an Arduino board, to actuate motors based on the estimated coordinates of the target.


This work was performed as an end-semester project for a course on Computer Graphics
Modelled and textured a 3D room, complete with tables, chairs, OpenGL lights, a bed, paintings, flooring, a mirror and a music box with a man inside.
Functionality included a camera fly-through, brought about by plotting Bezier splines through points clicked by the user. Animated the music box employing interpolation techniques between key frames.
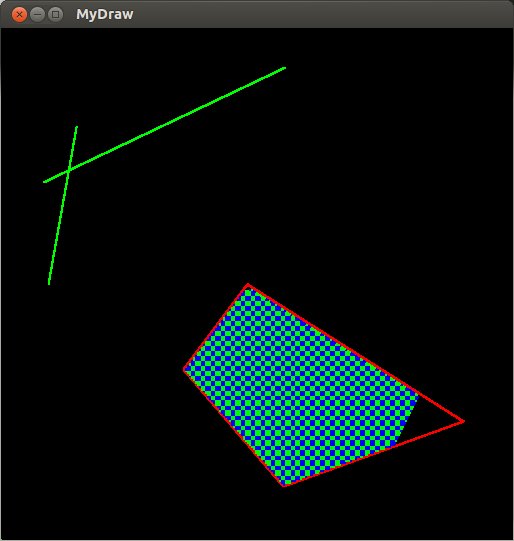
This work was performed as a mid-semester project for a course on Computer Graphics
Developed a simple 2D drawing program capable of drawing points, lines, polygons and freeform shapes on a 2D canvas. The program also supported filling of closed shapes using the flood fill algorithm. File I/O routines were implemented to load and store drawings.
The entire program was coded with limited use of OpenGL functionality with the objective of getting a firm grasp on the algorithmic underpinnings of OpenGL routines.
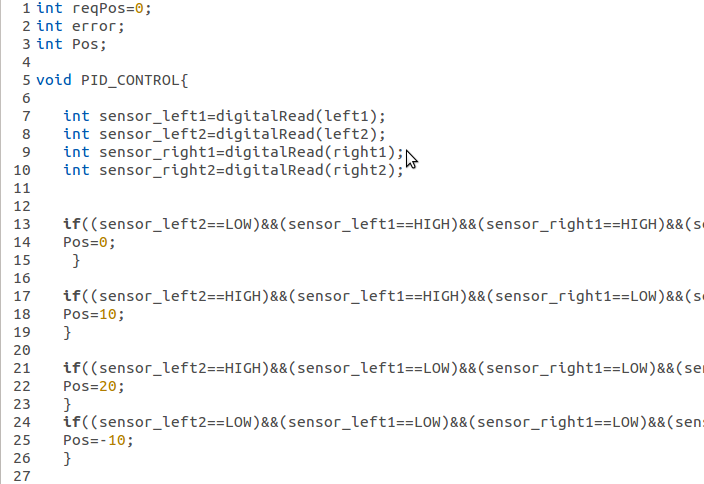
Developed a line-following robot capable of autonomously traversing a colour-coded path. Interfaced an Arduino board with IR LEDs and receivers to detect shifts in colour in the infrared spectrum of the surface beneath the sensor module.
A proportional integral-derivative (PID) controller was used for motor control, receiving feedback from the sensory circuit.