Figures
in the top row shows the timing diagram for a short exposure,
traditional camera and coded exposure camera. In a traditional camera,
the shutter is open for the entire duration of time. In a coded
exposure camera, the shutter is
fluttered
open and close according to a binary pseudo-random sequence
within a single exposure time. The
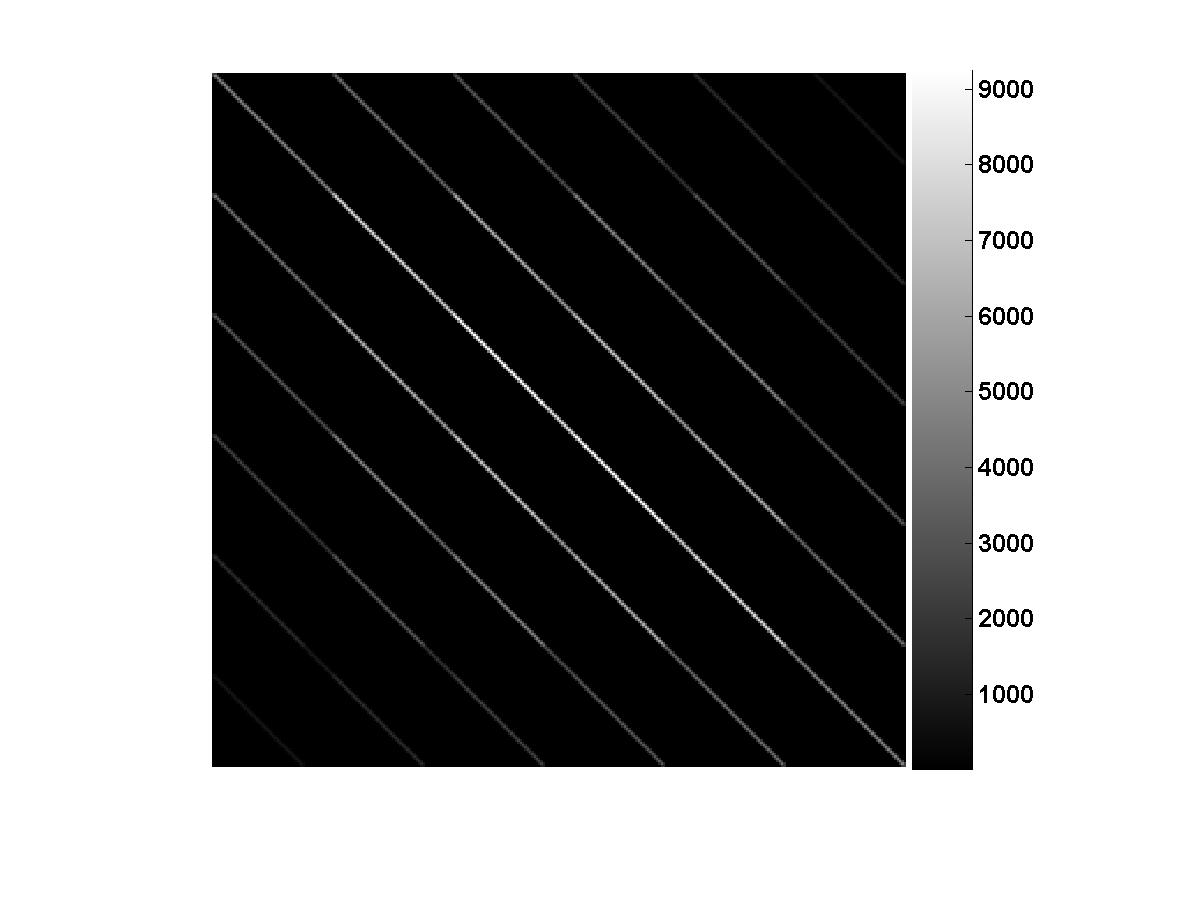
sequence is chosen so that the resulting motion blur PSF has a flat
frequency spectrum and maximizes the minimum of the DFT magnitudes. For
a traditional camera, the PSF corresponds to a box filter which has
zeros in the frequency spectrum, making the inverse filtering
ill-posed. The fluttering in the coded exposure camera makes the
deconvolution well-posed.
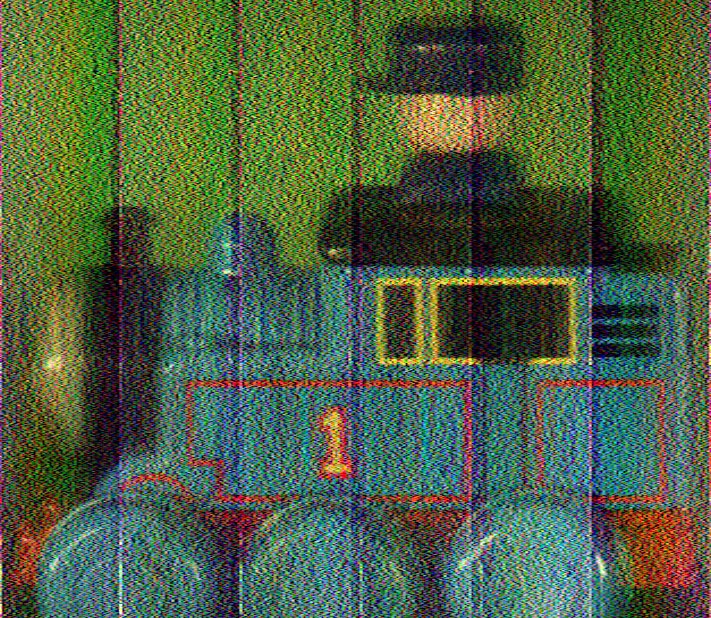
In a traditional camera, motion
blurring results in a continuous smear as compared to replicas in a
coded exposure camera. The high spatial frequencies are preserved in
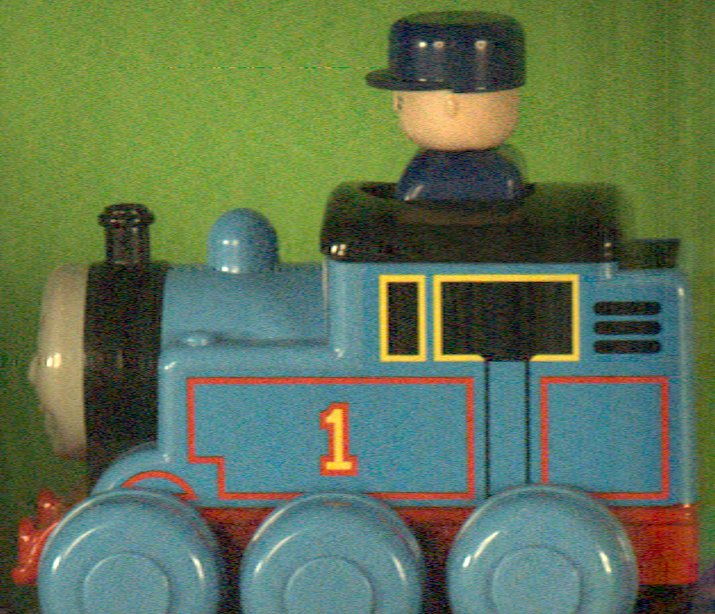
coded exposure. Deconvolution by solving a simple linear system gives
the output image free of any ringing and deconvolution artifacts.
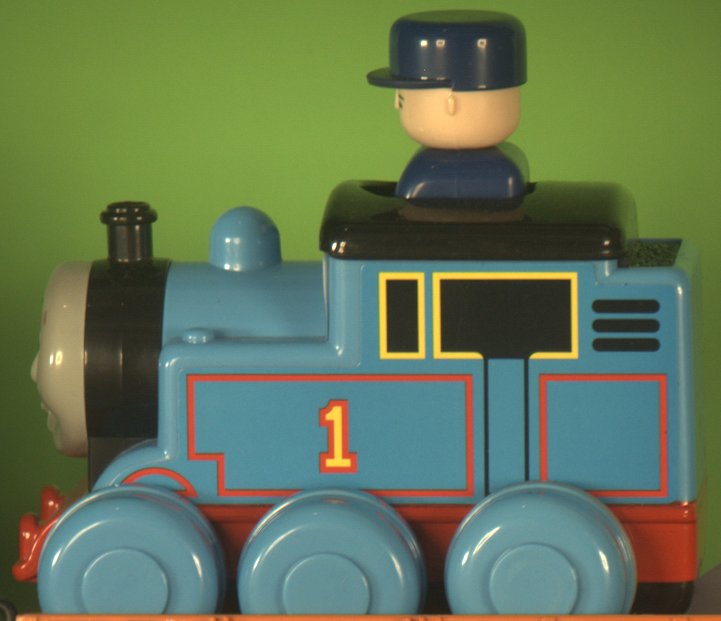
Compare it with the ground truth static image of the object captured
separately. In contrast, traditional deblurring results in large noise
and banding artifacts. We also show the result using Richardson-Lucy
algorithm (Matlab implementation) which reduces noise but smooth out
the image, reducing its sharpness.